GitLab Runner Technical Problems
Problems Codebase GitLab Runner’s codebase hasn’t aged too well and has been extended in …
| Status | Authors | Coach | DRIs | Owning Stage | Created |
|---|---|---|---|---|---|
| proposed |
josephburnett
ajwalker
|
devops verify | 2024-11-05 |
This document is a technical vision, not a product or feature roadmap. It describes how to decompose the GitLab Runner problem space in such a way that it can be reassembled into the products and features we have, the ones we want, and the ones we haven’t thought of yet.
“Design is to take things apart in such a way that they can be put back together” - Rich Hickey https://www.infoq.com/presentations/Design-Composition-Performance (3:10)
The composition and abstractions of this architecture are designed to solve several long-standing difficulties in the GitLab Runner. They will allow faster feature development by allowing external teams to “solve their own problems” with plugins and steps independent of the core runner team. Decomposition along orthogonal dimensions of responsibility instead of “executors” will allow for more simple components with higher test coverage and overall higher reliability. Consistent use of fewer abstractions will allow easier understanding of the codebase and less repeated work.
For a list of known problems see GitLab Runner Technical Problems.
GitLab Runner is available for all major operating systems and architectures. It can run thousands of jobs concurrently in local or remote environments. It can autoscale remote environments based on current and future load. It can be adapted to an unbounded number of environments through a self-service plugin mechanism, such that autoscaling works out-of-the-box.
The runner operating system and architecture does not need to match that of the remote environment. GitLab Runner is capable of discovering and reconnecting to jobs running in remote environments, without losing job state. It provides observability of the remote environment capacity and asserts back-pressure in response to resource constraints (such as insufficient capacity).
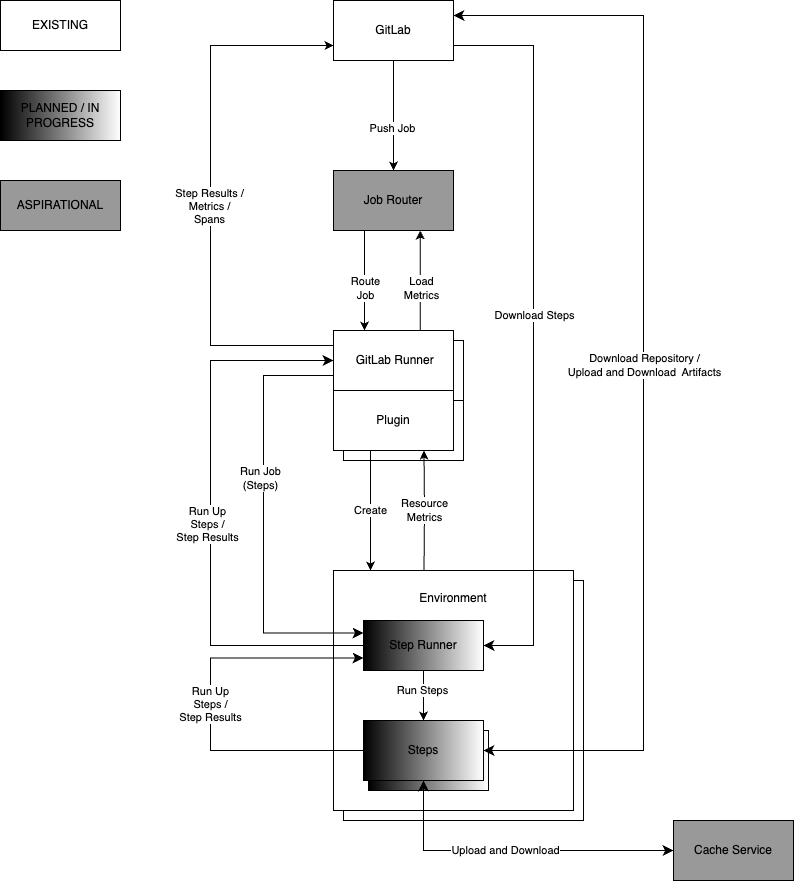
Jobs are delivered as gRPC payloads. All jobs are composed of steps which are executed by an agent (Step Runner) in the job environment. Steps may be local or remote. Local step versions are determined by the commit SHA. Remote step versions are determined by a secure lockfile stored in the repository. The results of a job are returned over gRPC to GitLab (separately from the logs) and describe the exact parameters of every step executed. Steps can be written to be deterministic, allowing step results to be used to reproduce artifacts, byte-for-byte
Step policy is provided by GitLab and enforced by GitLab Runner and its agent in the job environment. Policy may constrain available steps and their versions, insert required steps, and constrain resources consumed (such as network and disk).
Steps which are capable of creating their own environment locally, such as a Docker step, can delegate steps into that environment with a regular run request. Having full control of the results, they can decide what to do with them and then incorporate the results in the overall tree. In this way the final job results capture step execution across environments.
Job payloads container steps and calling parameters can be downloaded from any environment and run locally for debugging. Or jobs can be debugged in-place by inserting breakpoints into steps and connecting via gRPC to see the execution context and interact with the job environment. Steps can be unit tested with a built-in testing framework. They can be published and consumed through public and private catalogs, as well as within the local repository. Steps can be marked as deprecated or defective and consumers are automatically notified.
Common aspects of jobs such as checkout, cache and artifacts are implemented as steps, outside GitLab Runner and its agent. Vertical integrations such as artifacts can be owned entirely by a single team. E.g. The team who owns the artifact APIs in GitLab can also own the steps that upload and download from them. GitLab Runner provides an environment and injects the job payload. But it doesn’t control exactly what runs in that payload. Ownership of various aspects of job execution is federated to specialized teams. E.g. Artifact signing and secret management are implemented as steps owned by other teams.
GitLab Runner has one way to execute jobs. All aspects of “executors” are implemented by means of encapsulation steps (such as Docker) or as pre/post hooks in the environment plugin mechanism. Runner is responsible only for dispatching jobs to environments and connecting to those environments to deliver the job payload and return results.
Executor responsibilities are pull out entirely to one or more plugins. E.g. “kubernetes” plugin(s) are capable of customizing pods according to job requirements. There are no more built-in services, just service steps which the runner prepends to the job payload.
Even pre-existing “scripts” are wrapped and delivered as step payloads so all CI configuration gain the benefits of a unified steps-based execution model.
GitLab Runner is supported by tools to setup, configure and maintain small, medium and large installations. Fleet management tools implement industry best practices such as blue-green deployments. These tools are used to operate all runners on GitLab.com as well as being available for self-hosted customers. Anyone can contribute to GitLab.com’s runner infrastructure.
Default images for remote job environments are publicly available. Tools to build private images are also available and work out-of-the-box. Best practices for GitLab Runner efficiency and reliability are implemented in the shared tool set.
Time spans for every job, step and sub-step are exported via OpenTelemetry and are available as observability data. Likewise real-world resource consumption (CPU, memory, etc..) is available for each job. Resource consumption is tracked over time and, when an environment permits, resource requests are tailored automatically to the job’s need.
Resource metrics are fetched by GitLab Runner through the environment-specific plugin for each job. Time spans are returned to GitLab Runner with step results. Overall capacity and load is aggregated by the autoscaling component within GitLab Runner. This metric data is pushed from GitLab Runner to a gRPC endpoint on GitLab for observability purposes, so it can be proxied the the appropriate time-series database. Load are also returned to the Job Router for autoscaling and routing purposes.
Job routing and autoscaling decisions are made centrally in a simple, dedicated routing service. Jobs can be routed around outages and capacity limitations. Created jobs are immediately known to the runner autoscaling system, even before the jobs are ready for execution. GitLab can provide policy which affects routing, including preferred regions, providers and instance types.
Jobs can also be routed according to resource requirements and available capacity, reported by individual runners. Jobs can also have a relative priority which will affect queuing behavior.
Arrows are the flow of data
eef3c341)
